Drones no estilo faça você mesmo
Este post está sempre sendo atualizado e é dedicado a elaborar um roteiro para montar um veiculo aéreo não tripulado (VANT) ou drone do tipo quad-rotor ou multi-rotor. Incluindo o projeto do hardware e software/firmware. E que seja facilmente personalizável.
Demonstração do drone semelhante ao que está sendo montado neste post
http://vimeo.com/28427063
mwc quad // suppo 2212/13 from warthox on Vimeo.
mwc quad // learning to fly inverted [uncut] from warthox on Vimeo.
Ferramenta para cálculo do motor e hélices.
http://www.drivecalc.de/
mwc quad // suppo 2212/13 from warthox on Vimeo.
mwc quad // learning to fly inverted [uncut] from warthox on Vimeo.
Ferramenta para cálculo do motor e hélices.
http://www.drivecalc.de/
 |
| Modelo de Drone simplificado |
Requisitos:
- Baixo custo (praticamente tudo chinês)
- Anticolisão
- Automatizado por GPS
Vamos a lista de peças necessárias e revisão.
Além disso, vou colocar um acompanhamento dos prazo que leva para chegar as peças.
Comprados:
frame - Turnigy Talon v1 Carbon Fiber (R$110)
4 x ESC HobbyWing Pentium - 30A - (R$100)
4 x motores Suppo A2212/13T 12A 1000kv - (R$100)
4 x hélices 9x5 de nylon - sendo 2 CW e 2 CCW
4 x hélices 8x4 de nylon - sendo 2 CW e 2 CCW
6 x sensor ultrasom (distância até 5 metros em +-x,+-y,+-z) - HC-SR04
sensor de pressão (altitude além dos 5 metros) - bmp085
2 x comunicação rádio 433mhz - cc1101
navegador bússola 3d - hmc5883l
giroscópio 3d - MPU6050
acelerômetro 3d - MPU6050
kit microcontrolador - Texas EK-ML4F120XL (ARM Cortex-m4)
kit microcontrolador - ST Discovery-VL (ARM Cortex-m3)
kit microcontrolador - FreeScale FRDM-KL25Z (ARM Cortex-m0)
kit microcontrolador - rl78/g13 (Renesas)
kit microcontrolador - Arduino Nano v3 (Atmel-AVR)
conversor USB/TTL - Prolific 2303HX
Falta comprar:
navegador gps -
comunicação gsm quadband - sim900
comunicação wifi - cc3000
bateria LiPo -
Carregador LiPo -
Frame / Esqueleto / Armação
As opções no mercado são de alumínio, fibra de carbono, fibra de vidro e plástico.
fibra de vidro e plástico são muito moles e quebram com extrema facilidade.
A de alumínio é leve e bem resistente, mas é fácil de arranhar.
A solução ideal seria de fibra de carbono que é mais leve que alumínio e mais forte que do aço.
Plástico
Fibra de vidro
Alumínio
Fibra de carbono
(este me parece a melhor opção custo / benefício)
[a versão 2.0 da primeira]
[uma opção com pés de helicóptero]
Se estiver a fim de fazer seu próprio frame em fibra de carbono, tem um cidadão explicando como faz para montar uma bicicleta, mas o processo é o mesmo.
Eletronic Speed Control (ESC)
O controle eletrônico de velocidade é aplicado a motores brushless trifásicos para controlar a velocidade com extrema precisão. Os motores compostos por 3 bobinas separadas de 120 graus, precisam ser acionadas sequencialmente para que o motor gire. O ESC geralmente é composto de uma fonte chaveada que é alimentada pela bateria do sistema (geralmente polímero de lítio [Lipo] de 3 células), e fornece um saída estabilizada de 5V (battery eliminator circuit [BEC]) para alimentar o microcontrolador do ESC e o resto do sistema, além da saída que vai para os transistor de efeito de campo (FET) que vai alimentar cada bobina do motor no momento certo. O FET funciona como uma chave de liga e desliga eletrônica que muda de aberto para fechado dependendo do que é injetado na base. O que o programa do ESC faz é controlar os FET usando GPIO do MCU. O MCU recebe como entrada o sinal de controle, a frequência de chaveamento do sinal de controle é usada para ajustar a velocidade do PWM que auxila no chaveamento dos FET obedecendo a sequência de disparo de 120 graus. Além disso, o MCU também recebe como entrada sinais de força contra eletromotriz (back EMF) para detectar onde está o miolo central do motor. À primeira vista parece um programa muito simples, mas existe muito mais detalhes para construir um ESC com HW e SW / FW otimizados. Como o objetivo é construir um Drone e não um ESC, vamos usar um solução já pronta e disponível comercialmente.
 |
| Esquema simplificado de um ESC com BEC |
 |
| Esquema elétrico de um ESC [s1] |
Importante: a corrente máxima suportada pelo ESC deve ser sempre maior (pelo menos 10% de folga) em relação a corrente máxima especificada pelo motor. O erro mais comum é usar um ESC com corrente menor do que a especificada pelo motor. A consequência deste erro é ver o ESC (em especial os FETs) virar carvão em menos de 1 segundo.
Corrente máxima 30A
http://dx.com/p/hobbywing-pentium-30a-brushless-speed-controller-esc-for-r-c-helicopter-quadcopter-black-184272 (cerca de $9,20)
http://dx.com/p/flying-30a-bec-electronic-speed-controller-for-brushless-motors-esc-11981 (cerca de $11,20)
Corrente máxima 40A
Corrente máxima 70A
Hélices / Propellers
As hélices possuem dois tipos CW e CCW. As CW cortam o ar em sentido horário e as CCW cortam o ar em sentido anti-horário. Para voar os drones quadrotor precisam ter 2 hélices de cada tipo.
A hélices possuem dois parâmetros: tamanho e ângulo de ataque.
Uma hélice 9 x 5 que dizer que o diâmetro da hélice é 9 polegadas e 5 é o ângulo de ataque do ar, ou seja, a inclinação da hélice é de 5 graus.
Relação tamanho vs ângulo de ataque vs empuxo gerado vs corrente necessária vs bateria
Quanto maior a hélice e o ângulo de ataque, maior será a força de empuxo gerada (Thrust).
A resistência do ar é proporcional a área da pá e ângulo de ataque.
Isso implica que uma maior resistência do ar causa um maior esforço do motor, e quanto maior o esforço do motor maior será a corrente necessária. E se a corrente necessária for próxima da máxima especificada pelo motor, provavelmente a eficiência energética do motor não será otimizada. E motor não otimizado implica consumir mais energia da bateria e como consequência menor autonomia de voo, pois a quantidade de energia da bateria é limitada. Aumentar o tamanho de bateria para ter mais energia implica em aumentar o peso, e aumentar o peso também causa mais esforço do motor.
Portanto não é um problema trivial dimensionar as configurações de hélice / motor / bateria / autonomia de voo desejada / peso extra para bagagens.
Parece mais um problema recursivo que só faz crescer de si mesmo.
O desafio é encontrar uma configuração de hélice que gere o empuxo desejado sem comprometer a eficiência energética do motor.
Além disso tudo, ainda tem de escolher o material do qual é feito a hélice. As hélices de plástico são baratas, mas costumam vibrar mais do que as hélices de fibra de carbono. A hélices de fibra de carbono são 100 vezes mais forte que as hélices de alumínio.
Além disso tudo, ainda tem de escolher o material do qual é feito a hélice. As hélices de plástico são baratas, mas costumam vibrar mais do que as hélices de fibra de carbono. A hélices de fibra de carbono são 100 vezes mais forte que as hélices de alumínio.
No caso das hélices de fibra de caborno é altamente recomendado realizar o balanceamento manual da hélice. É um processo simples de tentativa e erro, até deixar os dois lados da hélice com o mesmo peso.
Motores (Brushless Outrunner)
 |
| Motor Mistery / Suppo A2212/13T 1000Kv |
Existem basicamente 2 tipos de motores os outrunner (que a carcaça gira junto, tem alto torque e baixa rotação) e os motores inrunner (que somente o eixo gira, tem baixo torque e alta rotação).
A corrente máxima do ESC deve sempre ser maior que a corrente máxima exigida pelo motor.
Se o ESC tiver corrente máxima menor que a de exigência do motor, o ESC virará "plasma" em 1 segundo.
Cada motor foi projetado para um determinado esforço máximo, portanto sempre se deve utilizar uma hélice do tamanho adequado. Se a hélices exigirem mais esforço do que o máximo suportado pelo motor, quem virará "plasma" é o motor.
O desafio é usar a maior hélice possível (quanto maior a hélice e o ângulo de ataque, maior será o empuxo gerado) que o motor suporta. Uma vez achada tal hélice, é preciso usar um ESC que forneça uma corrente maior do que a corrente exigida pelo motor equipado com a hélice.
Mas aqui existe outro problema, quando o motor está trabalhando com esforço máximo em 99,99% dos casos boa parte da energia está sendo gasta em calor, pois o núcleo do motor já está saturado magneticamente faltando. Dai é necessário descobrir qual é o esforço máximo do motor que maximiza a eficiência na relação corrente consumida x torque produzido.
Opção de motor da EMAX
http://dx.com/p/emax-cf2822-1200kv-diy-brushless-external-rotor-electric-machine-motor-for-apc-8x3-8-more-218180
O fabricante é "SUPPO" modelo A2212/13T
http://dx.com/p/a2212-13t-1000kv-outrunner-brushless-motor-set-yellow-gold-silver-219554
(cerca de $12)
O mesmo motor SUPPO modelo A2212/13T com desconto
http://dx.com/p/kv1000-brushless-exterior-rotor-motor-outrunner-motor-yellow-154904
(cerca de $10)
[ref] http://www.rctimer.com/product_118.html
Model: 2212-13
Motor size: Ф28*26mm
Shaft size: Ф3.175*37mm
Weight: 50g
KV(rpm/v): 1000
Max Power: 150W
Battery: 2-3Li-Po
Test Prop: 11x7/10x5
Ri(M Ω): 0.127
ESC(A): 30A
 |
| Mecânica do motor A2212/13T |
| No. of Cells: | 2 - 3 Li-Poly ( 7.2V até 11.1V) 6 - 10 NiCd/NiMH |
| Kv: | 1000 RPM/V (até 11mil rpm sem hélice, com hélice é menos por causa da resistência do ar) |
| Max Efficiency: | 80% |
| Max Efficiency Current: | 4 - 10A (>75%) |
| No Load Current: | 0.5A @10V |
| Resistance: | 0.090 ohms |
| Max Current: | 13A for 60S (derrete se passar mais de um minuto com essa corrente) |
| Max Watts: | 150W |
| Weight: | 52.7 g / 1.86 oz |
| Size: | 28 mm dia x 28 mm bell length |
| Shaft Diameter: | 3.2 mm |
| Poles: | 14 |
| Model Weight: | 300 - 800g / 10.5 - 28.2 oz |
[ref] http://www.batteryheatedclothing.com/pages/a2212-13t-technical-data.html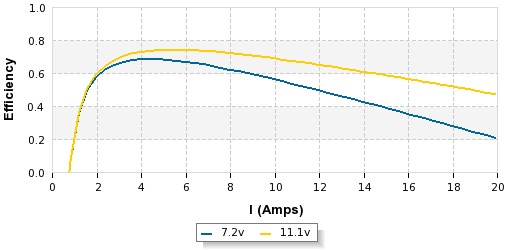 |
| Gráfico da eficiência enérgica do motor. Pelo que pode ser visto no gráfico a maior (próxima a 80%) fica na faixa de 4 a 8 amperes. |
Testando sem hélice, as velocidades são essas abaixo
| Volts | Amps | RPM |
|---|---|---|
| 7 | 0.6 | 7380 |
| 8 | 0.65 | 8460 |
| 10 | 0.75 | 10500 |
Testando com hélices
[ref] http://www.flybrushless.com/motor/view/206
| Propeller | Gear Ratio | Volts | Amps | Watts | RPM | Speed (mph) | Thrust (g) | Thrust (oz) | RPM as % of Kv*V |
|---|---|---|---|---|---|---|---|---|---|
| GWS HD 8x4 | 1 | 7 | 3.35 | 23 | 6630 | 25.1 | 226 (4x= 900g) mínimo | 7.97 | 88% |
| GWS HD 8x4 | 1 | 7.9 | 4.1 | 32 | 7410 | 28.1 | 287 | 10.12 | 87% |
| GWS HD 8x4 | 1 | 8.9 | 4.85 | 43 | 8220 | 31.1 | 347 | 12.24 | 86% |
| GWS HD 8x4 | 1 | 9.9 | 5.65 | 55 | 8940 | 33.9 | 420 | 14.82 | 84% |
| GWS HD 8x4 | 1 | 10.9 | 6.5 | 70 | 9660 | 36.6 | 495 (4x= 1980g) máximo | 17.46 | 82% |
| GWS HD 9x5 | 1 | 6.9 | 5.5 | 37 | 6000 | 28.4 | 348 (4x= 1392g) mínimo | 12.28 | 81% |
| GWS HD 9x5 | 1 | 7.9 | 6.7 | 52 | 6660 | 31.5 | 436 | 15.38 | 78% |
| GWS HD 9x5 | 1 | 8.9 | 7.85 | 69 | 7290 | 34.5 | 526 | 18.55 | 76% |
| GWS HD 9x5 | 1 | 9.9 | 9.25 | 91 | 7920 | 37.5 | 627 (4x= 2508g) máximo | 22.12 | 74% |
| APC E 10x5 | 1 | 6.9 | 7 | 48 | 5610 | 26.6 | 406 | 14.32 | 75% |
| APC E 10x5 | 1 | 7.9 | 8.45 | 66 | 6120 | 29.0 | 505 | 17.81 | 72% |
| APC E 10x5 | 1 | 8.9 | 9.9 | 88 | 6690 | 31.7 | 604 | 21.31 | 70% |
| APC E 10x5 | 1 | 9.9 | 11.45 | 113 | 7170 | 34.0 | 702 | 24.76 | 67% |
| APC E 10x5 | 1 | 10.9 | 13 (perigo) | 141 | 7650 | 36.2 | 802 | 28.29 | 65% |
| GWS HD 10x6 | 1 | 6.9 | 7.2 | 49 | 5610 | 31.9 | 424 | 14.96 | 75% |
| GWS HD 10x6 | 1 | 7.9 | 8.7 | 68 | 6180 | 35.1 | 526 | 18.55 | 72% |
| GWS HD 10x6 | 1 | 8.9 | 10.1 | 89 | 6690 | 38.0 | 617 | 21.76 | 70% |
| GWS HD 10x6 | 1 | 9.9 | 11.7 | 115 | 7200 | 40.9 | 722 | 25.47 | 67% |
| GWS HD 10x6 | 1 | 10.9 | 13.25 (perigo) | 144 | 7680 | 43.6 | 817 | 28.82 | 65% |
| GWS HD 10x8 | 1 | 10.8 | 18.2 (perigo) | 196 | 6390 | 48.4 | 733 | 25.86 | 55% |
 |
| Dados de temperatura do motor (complementando a tabela anterior): [ref] http://www.rcgroups.com/forums/attachment.php?attachmentid=3996646 |
Com hélices de 8x4 os motores juntos conseguem levantar cerca de 2kg no máximo. Para maximizar a vida da bateria o peso máximo deve ser de 900g.
Com hélices de 9x5 os motores juntos conseguem levantar cerca de 2,5kg no máximo.
Para maximizar a vida da bateria o peso máximo deve ser de 1392g.
O peso estimado do drone (frame[240g]+motores[4x51=204g]+esc[4x27g=108g] -> 552g)
Ainda falta somar as hélices e placas de controle, sensores e bateria.
Baterias (LiPo)
Bateria - LiPo 5000mAh 50C -> 5 x 50 = 250A de corrente de pico.
Banco de baterias nuclear - NanoTritium betavoltaic
Microncontralador ( CPU + RAM + FLASH )
Para o sistema de estabilização, anti-colisão, controle e comunicação podemos usar um microcontrolador com FreeRTOS ou um sistema com mais recursos para usar Linux.
Para FreeRTOS existem diversos kit de baixo custo (até US$ 20) com JTAG já embutida.
Texas
ST
Para Linux também existem diversas placas de baixo custo, com 512MB de RAM e cartão SD de até 64GB. Tudo de baixo custo (até $50)
Raspberry Pi
Beaglebone
Comunicação via RF ISM (433MHz / 915MHz)
Existem diversos rádio na banda de automação industrial que podem ser usados para controle remoto do drone. Todos de baixo custo (até US$ 5).
Texas CC1101
ST Spirit
Comunicação via WIFI (2.4Ghz / 5GHz)
Existem soluções de WIFI embarcado
Texas CC3000
http://dx.com/p/rt5350f-serial-port-ethernet-network-wireless-network-conversion-module-w-shielding-cover-239155 (cerca de $16)
Comunicação via GSM Quad Band
Existem soluções para usar a conexão de dados da rede celular.
Placa com SIM900 um SOC para GSM 850/900/1800/1900 Mhz
(cerca de $47)
Navegação e automação por GPS
Soluções de GPS embarcado
Navegação por Bússola
HMC5883L - ótima para navegar onde não tem sinal de GPS disponível
Giroscópio de 3 eixos + Acelerômetro de 3 eixos (estabilizador)
MPU6050 - Sensor da Invense 6 DOF
http://dx.com/p/gy-521-mpu6050-3-axis-acceleration-gyroscope-6dof-module-blue-154602
Sensor de distância até 5 metros (anti-colisão)
6 x Sonar - - evitar colisão nos eixos x,y,z
(em breve como construir um sonar)
Sensor de pressão (altitude)
MS5611-01BA03 -Altímetro com precisão de +-10cm
BMP085 - Altímetro da BOSH com precisão de +-25cm segundo o datasheet
Câmeras
Existem soluções prontas de alta definição e também versões embarcadas.
ov7670 300kpixel 640x480 vga 30fps
Referências:
[ 1 ] http://www.scoutuav.com/
[ 4 ] http://www.geek.com/science/spacex-video-shows-grasshopper-rocket-making-a-sci-fi-landing-1561397/